



|
Popular Science Node 1999/06/22 Vol.001 |
Popular Science Node HOMEPAGE http://www.moriyama.com/popular_science_node/ |
| Popular Science Node : Free Science Mailzine | |
|---|---|
| 素人のための科学情報を無料で配信中。今すぐご登録を! |
【その他提供中の情報】 | 新刊書籍情報 | | イベント情報 | | おすすめURL | etc... |
|
◆CONTENTS: |
[00000]
00:当メールマガジンのコンセプト
[Special]
01:HONDA P3
[New Books]
「テクノマエストロ」
[Event]
01:生化学若い研究者の会 夏の学校
[Website]
01:スペースパーソン
|
なぜ「ポピュラー・サイエンス・ノード」か? 当メールマガジンのコンセプト |
非常にいい加減なウェブの案内文にも関わらずご登録頂いた皆様、こんにちは。どうもありがとうございます。また、早く出せ出せとメールを送って下さった方、どうもでした。まず、当メールマガジンのタイトルならびに趣旨について、ごく簡単に説明いたします。
●なぜ「ポピュラー・サイエンス・ノード」か?
「ポピュラー・サイエンス」は、いわゆる「アカデミック・サイエンス」に対する言葉として使っています。しばしば通俗科学と訳されていますが、これは率直に言って語感やイメージが非常によくない。一方、最近流行の「市民の科学」という言葉も、私はあまり好きではありません。専門科学に対する言葉として捉えて敢えて漢字にしてしまうと、一般科学とでもなるのでしょうか(一般科学書と呼ばれるものはあるようですから)。でもこれもあまり座りがよくない。
よって、そのままカタカナとしました。科学を職業としない人間が、科学あるいは科学者たちの営みや成果を見て楽しむ、それがポピュラー・サイエンスだと思っています。じゃあ科学の楽しみってなんだと言われれば、それは自然の驚異や人間の為しえたことへの驚きなどなど、ということにでもなるでしょうか。私にもよく分かりませんが、おそらく意味は通じたと思います。
「ノード」とは「結節点」という意味です。ネットの上には科学好きもけっこういるのですから、素人が科学を楽しむための、つまりポピュラーサイエンスの情報をそれぞれの視点でまとめたウェブサイトがガンガン出てきても良いと思うのですが、実際の日本には、そういうサイトはほとんどありません。当初そういう目的を掲げて立ち上がったウェブもそのほとんどは更新を停止し、メルマガは発行を停止してしまいました。
残念ながら、これが実状です。日本語で書かれたウェブサイトで、ポピュラーサイエンスに興味関心を持つ人間が取りあえずアクセスするスタート地点、中継地点、そういったものはほとんどないに等しいのが現状なのです。もちろん全くないわけではない。限られたジャンルについてであれば、優れたコンテンツもあります(あまり知られてないのが問題ですが。これは科学ジャンルにありがちな、宣伝・広報行為の軽視が理由だと思います)。ですが、とにかく何があってもまずここから、というウェブサイトが少なくとも複数あっても良いはずだと思うのですが、ほとんど見あたらないのです。
ただ、私がここで申し上げているのはいわゆる「リンク集」のことではありません。大規模リンク集は、優秀な全文検索エンジンの登場により、その存在意義をほとんど失いました。
そうではなく、ある一方向からやってきた人が、あらかじめ予測をついた決められた方向だけに行くのではなく、より「交点」として機能するような何かが必要なのではないか、ということなのです。意味が分からないと思いますが、それは当然で、私自身もよく理解していないことを書き連ねているからです。自分で分かり切ったことを書いても面白くもなんともありませんから。
ただ、それぞれ自分の興味のあるジャンルを歩いてきた人々が、ふと別の方向の道に興味を持ったとき、その道々が交わる一点があれば、何事かが起こることもあるかもしれない。あるいは実際の交点がしばしば広場となって中央に噴水を抱え名所となるように、人々が漠然と集うことができるかもしれない。お互いはお互いに積極的に興味関心を持っていなくても、なんとなくその雰囲気を感じ、それが喜びに繋がるかもしれない。
まあおそらく、ウェブを初めてさわったときにハマッた人、そしてその時の感動を覚えているかたならば、なんとなくご理解頂けるのではないかと思います。
なんだかわけがわからないことを妙に気を張って書いてしまいましたが、こういうことも頭の片隅には置きつつ、実際の内容はお気楽極楽的なものにするつもりです。
僕が応援したいと思うモノ・人・研究などを勝手に応援したりといったこともやっていきたいし、他の人々に寄稿をお願いするということもあろうと思います。とにかく面白そうなことを思いついたら可能な限りなんでもやっていきたい。
ではでは、今後ともよろしくどうぞ。
編集人 森山和道(http://www.moriyama.com/)
◇ホンダのヒューマノイド・ロボット |
■さて、では本文です。科学科学といっていたわりに、いきなり最初から「技術」の話ですが、まあご容赦を。ただ、現在の技術はものづくりのみならず、ものを取り巻く事象へも向かっているわけで(『工学の絵本』オーム社など参照)、ある意味で科学と技術は再び融合しつつあるとも言えるのかもしれません。少なくともエッジにおいては。
「ですます」はなんだかやりにくいので「日記調」にします。ウェブ日記に書いた話と、メモをベースに今回書き下ろした部分がいり混ざっているので読みにくい部分も多々あると思いますが、ご容赦下さい。
|
○高まる期待 |
■私がホンダのヒューマノイドロボット(http://www.honda.co.jp/tech/other/robot.html)が歩くのを実際に見たのは、1998年の10月17日、ざんざんぶりの雨の日だった。福島県郡山市でひらかれた、「ロボットワールド21」というシンポジウムの中でのこと。とある雑誌記事用の取材だったのだが、その雑誌そのものの方向転換のため結局、記事の形では書かなかった。だがそれも社会資源の無駄使いだと思うので、ここで当時の日記とメモを元に、その時の印象その他を簡単にまとめてみたい。
■シンポジウムそのものは吉川弘之、立花隆、たち・すすむ(漢字が出ないのでひらがなでご容赦を)、中村浩美、広瀬茂雄という面々で行われた。比較的マスコミ向けの面々なのは、電通(博報堂だったかも)が仕切っていたのと、会場となった場所のこけら落とし的イベントだったからだろう。
すぐ横では例によって各大学のロボットが展示、実演されていた。だから実際にロボットを製作している学生や研究者諸氏も大勢来ていたと思う。
■だが、なんといっても当日の目玉&我々(そして、その場にいた人ほとんど)の目的は、ホンダ平井和雄常務率いるP3の一般公開だった(正確にはP3改。最初発表されたP3とはボディの形が見た目にも違う)。P3はビデオや取材陣へは公開されていたが、一般への公開は初めてのこと。一般の方々も大勢見に来ていたようだ。
■午前中の講演が終わり、午後1でP3が公開されるということになった。昼食時間中にステージの上手には一世代前のP2(筑紫哲也NEWS23で立花隆氏と共演したアレ)が展示され、すぐに人だかり。
一方、下手にはいかにもな大きさの箱が運び込まれた。横の展示会場では動きこそしないものの、実際のP3も展示されていたのだが、人々の期待は否が応でもこちらに集まってくる。実際に演示をやっていた学生たちも、かなりの人数がこちらへやってきていたようだ(僕も見ましたという人、もしいたらメールを下さい)。
|
○P3登場 |
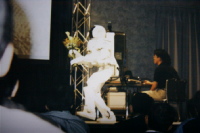
 ■そしていよいよ、ホンダの平井和雄常務による講演が始まった。いやその前に、主役が登場しなければならない。司会の女性がふる。「ホンダP3です!」
■そしていよいよ、ホンダの平井和雄常務による講演が始まった。いやその前に、主役が登場しなければならない。司会の女性がふる。「ホンダP3です!」
■P3が暗闇の中からシルエットで現れる。胸のあたりでは何を示すのか分からないが、光が明滅している(TVなどでは見えてないと思うけど、そんなものがついているのです。本当)。この時点で会場の人々は一斉に身を乗り出す。
■そしてP3がガチョンガチョンと床をきしませて歩いて瞬間、場内から「オー…」という感嘆の声が一斉に、しかも、ごく自然に上がった。「オー!」ではない。低音の、声とも吐息とも言えないような音が、一斉に上がったのだ。久々にそんなどよめきを聞いたように思った。「ただ歩くだけ」で、P3は会場中の人を魅了してしまったのである。
 ■実際に見たP3は、体を左右に揺らしながら歩いていた。最初は気づかなかったのだが、正面から歩いてくるところを見ると、確かに体を揺らしながら歩いている。揺らしながらというのはあまり正確ではないな。どちらかというと「重心を右左に移しながら」といったほうがわかりやすいかもしれない。
■実際に見たP3は、体を左右に揺らしながら歩いていた。最初は気づかなかったのだが、正面から歩いてくるところを見ると、確かに体を揺らしながら歩いている。揺らしながらというのはあまり正確ではないな。どちらかというと「重心を右左に移しながら」といったほうがわかりやすいかもしれない。
これは多分、P3には腰がない(写真などをご覧頂ければお分かり頂けるとおり、胴体からいきなり足が生えている)ために、腰で体をバランスさせることができず、足を踏み出すときは、それぞれ接地している足のほうに体重を完全に移してしまうからだろう。
■腕を全く振らずに歩いているのも、直接見るとなんだかやっぱり不自然。人間が腕を振るのは体がねじれるのをキャンセルするためなのだが、このくらいのスピードならば構造で吸収出来る、ということらしい。
■またよく見ると足がブルブル震えているせいで、まるで「全身」に力を入れて歩いているように見えた。当たり前だが接地衝撃の緩和は、構造ではやれないはず(足の下には長靴のゴム底のようなものが張られているが、制御への影響はともかく、実際の衝撃緩和にはそれくらいではたかがしれているでしょう)。そこで制御で行っているわけだが、多分そのせいだろうと思う(大ウソかもしれないが)。
■このように、実際に見ると意外と人間の歩き方に似ていないんだなあ、というのが第一印象だった。
とは言っても、生で見たP3の歩行は、圧倒的な衝撃だった。想像以上のものがあった。ビデオは何度も見ていたが、やはり実物は全く違った。
■その臨場感を醸しだし、すさまじかったものに「足音」がある。まさにガインガインというかガチョンガチョンというかガッシャンガッシャンというか、とにかくモーター音と、仮設ステージに足を降ろしたときの音が凄い!
その音は、まさに僕らが知っている「あの音」で、オタク心はいたく刺激された(笑)。しかし本当にこんな音なんだ、という感動があった(でも後になってよく考えると、それこそ衝撃緩和を全くやってないということの裏返しでもある。体重が多少重くても、生物は音もなく歩くことができるのだから。だが見ていたときはそんなことまで頭が回らなかった)。
■そして皆が一様にまず驚いていたのは、その足運びの「速さ」だったと思う。公称では確か時速二キロとなっていたと思うが、二キロ以上は出ていたと思う。本当に意外なほど速く、さっさと(もちろん実際はドシンドシンと)歩くP3。思わずあとずさる司会の女性(笑)。いやー、その気持ちはよく分かるぞ。
なんせ身長160cmしかないとは言え、まさに「ロボット」なのである。司会の女性に花束を渡すという演示だったのだが、あんなのが轟音とともに正面からノシノシと歩いてきたら、思わずウッとなってしまうでしょう。
|
○P2とP3の違い ~ダウンサイジングと材料置換、電装系の再設計 |
■そうしてホンダの平井和雄常務による講演が始まった。
まずは簡単な、P2からP3への課題の紹介であった。
■P2とP3の違いは、その大きさである。見た目にも全く違う。
P2は消費電力が2750Wと大きく、重かった。移動にも時間がかかった。さらにその大きさのため人にも脅威感を与えてしまう。これでは家庭には入れない。だいたい、開発側としても扱うのが大変である。
そこでダウンサイジングと軽量化がP2→P3のテーマであり、その結果として出てきたのがP3だった。だいたい二まわりほど小さい。P2初登場のときほどのインパクトはなかったものの、大幅に進歩している。
■P2の総重量は210kgもあったが、P3の総重量は130kg(うちバッテリの重さ20kg)になった。大きさもコンパクトになった。182cmあった身長が、160cmになったのだ。軽量化のため、材料置換も行われた(アルミニウム→マグネシウム合金)。
電装系の再設計も行われた。コンピュータがらみの配線数は、なんと650本から30本にまで減らされた。これは「分散システム化」によって実現した。P2までは各部品と背中のメインコンピュータが直結されていたが、手足に合計30個ほどのコンピュータを仕込んでネットワークで結び、間接の接続に切り替えたのである。これによって大幅な配線削減に成功。消費電力も1/3に。同時に信頼性も向上した(P2はよく動かなくなったそうである)。これは上記のような理由に加え、中継コネクタ数が接点数2000→500へと、大幅な削減に成功したためである。さらにはバッテリーもワンタッチで交換できるようになった。
|
○実演 |
■そして紹介は終わり、各種実演にうつった。再び登場するP3。まずはドアを開けて通る、という実演である。これは位置ではなくて力の制御が出来る、というデモンストレーションだったのが、その辺のたいしたものだ感が会場の人にどの程度伝わったのかは疑問であった。
■その他デモンストレーションは、押されても平気(立花隆がやってた奴)、懐中電灯を拾う、花束を渡す、正座ができる(足の裏は接地したままなので正確には正座ではない。非常時、その状態で電源を落とせば転倒の心配がない)などが披露された。
またそもそも、(固い床だけでなく)仮設ステージのように大きくたわむ床でも平気で歩ける、というのがホンダのロボットの凄いところなのだが、その辺の話については既に他の科学雑誌や本(鹿野司『巨大ロボット誕生』秀和システムなど)でも紹介されているので省略。
■とにかく一挙一投足が面白かったが、懐中電灯を取る動きもまた面白かった。P3は、まず目で懐中電灯の位置を確認したあと、懐中電灯が足下に近すぎた場合、自分で後ろに下がってから取るのである。
■前後が逆になったが、実際にP3を動かすときにはワークステーション上で指示する。ワークステーションには、P3のカメラからの映像が送られている。オペレータが目的地を指示すると、ロボットは自分で距離を測り、そして歩くことができる。デモンストレーションでもやっていたが、実に簡単なオペレーションでロボットを歩行させることができるというのは驚きであった。
■そう、中には勘違いしている人も多いようなのだが、ホンダのロボットは自律は自律だが、別に自分で勝手に歩き回ったりするわけではない。要するに、自分で歩き回るアトムではなく、オペレーターが操縦するガンダムなのだ。そこらへん、ソニーのエンタテインメント・ロボットとは根本的に違う。
|
○今後の課題とヒューマノイドロボットのアプリケーション |
■実演終了後、再び簡単に講演が行われた。今後の課題として、以下のようなものが挙げられた。
・さらなる小型・軽量化の可能性──ただし身長についてはだいたいこのくらいでよいのではないか。あまり小さくすると階段も上れなくなるし、大きなものを持ったりすることもできなくなる。
・操作の簡素化と自律判断機能
(特にものの認識)
たとえばノートパソコンなどでも操作できるように。
いまのところ、ロボットは一切認識を行っていないので、今後は──
・いかなる状況にも対応できる機能を追求する
腰がないから腰をつけ、ひっくりかえっても起きあがったりできるようにする。
現在は「受け身」ができない。ころんでも壊れないように(そのためにも軽量化)。
■また誰もが知りたいホンダが考えているアプリケーション、使用目的についても、ごく簡単に触れられた。
曰く、産業用ロボットではないヒューマノイドロボットの場合、やみくもに使うと嫌われてしまう可能性がある。だから最初に応用する領域の選定が重要だとのこと。確かにその通りだと思うが、具体的な話は聞けなかった。いちおう以下のような話があった。
という形で終わってしまった。
これだけではプロダクトとしてどんな形を目指しているのかは、さっぱり分からない。
だがとにかく、圧倒的な印象だけを残した。
|
○取材 |
■シンポ終了後、短時間かつ簡単ながら、常務と技術者の方々合計7人にお話を伺う
ことができた。
実際に歩いたのを見たインパクトと、その後のパネルの眠さ──というか実際かなり熟睡していた(だって、「いつもの話」やSF論ばっかだったんだから仕方ないでしょ(^^;)。P3見たあとにそんな話されても面白くもなんともないのよ)──をひきずっていたことと、聞きたいことがありすぎたのが相まって、うまく話をお聞きできなかったことが残念だったし、また、こちらが何か伺うたびに、ちらっと常務の方に目線をやるのが気になったが(笑)、皆さん至って気さくにお話をして頂いた。私個人は、ただひたすら、ああいうロボットを作った人たち、ということで子供のように喜んでしまっていた(これがいけなかったのだが)。
とにかく皆さんが実に楽しそうに「ものづくり」しているようだった。もっとも、聞いても教えてくれないことも多かったけど、そこはまあ仕方ない、と諦めて話を聞いた。
話はまず、もともとはモビリティの開発という側面から始まった、ホンダはモビリティのメーカーだから云々、というおなじみの話から始まった(この辺のことは茂木宏子『夢をかなえるエンジニア』小学館に書かれている。編集人による書評は http://www.moriyama.com/sciencebook.98.5.htm#sci.98.5.14)。
メモ形式で恐縮だが、だいたい以下のような話を伺った。
やはり読みづらいと思うが、ご勘弁を。なお質問者・回答者とも複数である。
最初は、本当に一人しかいなかった。そこにすぐもう一人が加わって、そうこうして いるうちに開発が始まった。
最初にテーマ選定があった。新たなテーマにチャレンジしようと。当時4つのプロジェクトが進んでいたのだが、その内の一つだった。
ホンダはバイクと車で2次元をやっていたが、3次元が飛行機、ロボットは4次元という位置づけだった(分身っていう側面があったから四次元だと言っていたようだ)。
Q:何年で成果を出そうといった目標はなかったのか?
5年間で成果を出しましょう、というのはあった。取りあえず2足歩行の達成が目標だった。5年目にはできていた。
ただその間に不景気などがあって大変は大変だった。
Q:次のステップは?
まだ2足歩行技術としても完成していない。様々な問題がある。たとえば予測してなかった障害物があったらよけられないし、タバコも買いに行けない。
Q:研究者としてはタバコを買いに行くのを目指しているのか、それとももっと手近なところを…?
町の中に人がいなければ、実現性はかなり高い。
今は歩いているときはカメラはついていても目をつぶって歩いているようなもん。歩きながら路面や状況をリアルタイムに認識しながら歩行できるようになればもっと安定性が増すし、対応できるようになる。そうなればタバコを買いに行くことはできるようになる。ナビゲーションのシステムも搭載できる。
ただ現実問題として街には必ず人がいる。人とどう共存していくかが非常に難しい。人の行動はよめない。そこをどうクリアするが難問。
ただロボットの動きを研究していると、ロボットの先の動きの予測というのはある程度できるようになってくる。そのような研究成果から、人間の挙動の予測といったものも、ある程度できるようになってくるのではないか。たとえばすれ違うときに相手がぶつかってくるのかどうかといったことが、ロボットの研究をやることから、ある程度は分かってくるのではないか。
Q:それは今の演算速度では厳しいのではないか。
いまのままでは確かに厳しいが、あまり心配することはないと思う。コンピュータの進歩のほうがずっと早い。
Q:P2やP3の動き方、軌道を変えながら動くというやりかたも、演算速度が速くなったから実現できたのではないか。
そうですね、10年前だったら確かに不可能な技術だった。大学でその頃の2足やっている人たちはコンピュータはそんなに早くないというのが大前提で、まあ、どうしてもその、なんていうのか、制御系を組むときに、どうしても単純化してしまおうという考えがあった。従来ある制御技術のほう、確立している技術のほうに乗っけよう乗っけようとしているところが主だった。
しかしコンピュータの速度が上がってくると、従来の制御じゃない方法でできるんじゃないかなという考えがあった。コンピュータの負荷としては大きいんだけど、コンピュータに負荷をかけることを許してしまうような制御を考えることによって、従来とは違うところに到達した、というところがある。
Q:それは一号機、あるいはその前に開発されていた足だけのタイプの頃からそうだったのか。
そうです。
Q:同じ動歩行でも、こちらのプロジェクトでは最初から違うところを目指していた、ということか。
そうです。最初から狙って制御系を組んでいた。単なるピッチングプレイバックみたいな、関節角を覚えていてそれを吐き出すようなやり方をやっているようでは歩き方を途中で変えることはできない。それをはじめから、どこからでも軌道パターンを変えられると。そういうものを意識していた。
一歩ごとに歩行パターンを変えるというのはいくつかメニューを用意しておいてそれを選択するという形をとればできるが、一歩の間の任意のどこの点でも連続的に他のパターンに変えられる、それを最初から目指していた。
いずれにしてもコンピュータの負荷というのは大した問題ではない。それ以外の問題はいくらでもある。
Q:どんな問題があるのか。
(あまり具体性がない解答)
Q:ヒューマノイドロボットという形のあれを一つのプラットフォームとして、様々な技術をアセンブリしていけば、そのうち色んなことができるようになるだろうということか。
技術を積み上げることで何かできるだろうという形で考えていってはいけないのだと思う。たとえばタバコを買いに行くということが目標ですという形でやると技術的な困難がいろいろとある。それを10年やってできるようになったとする。そうすると、「いったいなんなの?」と言われてしまうだろう。
だからそういうシーンを想定することは良いんだけど、あんまりそこの技術にこだわるとか、現状の技術の積み重ねの中でコンピュータの速度がこのくらいいるとか、バッテリーはこのくらいのものがいるとか、足の強度はこのくらい必要だと、そういう形で技術を積み重ねていっても、たぶん、ダメなんでしょうね。できたときに、これはなんなんだと言われちゃいますよ。小遣い渡したら走ってタバコ買ってくるからだからなんだ、という人も出て来ちゃいますよ。
だからあんまりそういうシーンにこだわるとダメなんです。10年後にね、ヒューマノイドロボットは何をすれば一番喜ばれるのか、社会に受け入れられるのかということを考えないと。だから10年先20年先となると、技術の延長というより哲学的なんですね。
もちろん日々技術は積んでいかなければならない。だが目標はそうじゃないということ。
Q:具体的な目標はあるのか。
イヤないですよ。ただ、極限作業用ロボットなどはヒューマノイドとしては面白くない。
もうちょっと夢のあるほうがいいじゃない。
Q:それは「勝者の余裕」か(笑)?
いやいや、そんなことはない。(でも笑っていた)
ホンダがヒューマノイドにある程度成功したことで、ヒューマノイド議論に火がついたという感じがする、この2年で(当時)。やっぱりニュース23で出したのが大きかった。あれは機械学会100周年と合わせてやったんだけど。ただ思った以上の反響だった。ただ、ああいう出来事というのは滅多にない。たぶんこれからもない。あそこでヒューマノイド議論に火がついた。
そこで一番出てくる話は、ヒューマノイド作ってなにするんだ、というもの。逆にそうやって考えにくいからこそ、本当に考えられたら良い市場なんですよ。
Q:キラーアプリみたいなもの、アプリケーションは取りあえずほっといて考えずにおこうと?
いやいやそんなことはない。考えてはいるんだけど、いまはまだ、「これが」と言える段階ではないということ。ただ、考えてないわけではない。
だから二つあると思う。自分たちで考えて提案するのがまず一つ。もう一つは、あれをアプリケーションのプラットフォームとして考えるというのもあると思うんですよ。こういうことができるじゃない、ああいうこともできるじゃない、とか。ただ、買い物したり、介護したり、アトラクションの案内をしたり、力仕事をしたりというのではあまりに応用範囲が広すぎる。そんなことやると対応できない。だから一つに絞ってやっていくのも面白いと思う。自分たちがやろうとするものをやって、それを供給していくという考え方もあると思う。
そう決めたわけじゃないですよ。あくまで個人的意見として言っている。
Q:ではホンダさんが考えていらっしゃるアプリケーションというのは。
まだ言える話じゃない。中途半端にいろいろ言ってもね、混乱するだけだから。そう いう段階ではないということ。
Q:P4はできているのか。一年にだいたい一つできていたという話だったので。
いやできていません(当時。もちろんその後の発表もないが)。
|
【技術者の方の声】 |
Q:現場でやっていて、この辺が苦しいとか楽しいとかいう話があったら伺いたい。 (以下箇条書き)
・あまり事情を知らずに配属され、研究室でロボットが歩いているのを見て、思わず 目を疑った。一般の人へ演示をしたときのインパクトを受けた顔や、いろんなメディ アに取り上げられている様子などを見て、自分たちの仕事が評価されているんだなあ と感じることが喜び。
・技術を積み重ね、課題を乗り越えて達成していくことの楽しさがある。
・ロボットの研究は人間の研究でもある。身体をどう感覚しているかとか。
「歩く」という動作は、確かに子供でもできること。でも、それがどういう動作なのか分かっている事と分かっていないことの間には、大きな差がある。
・開発の最初の頃は苦労の連続だったが、ようやく「遊べる」ようになってきた。ま だまだクリアしなければならない課題は多いが、余裕がでてきたのかも。
・「こんな簡単なことが」ということが、果てしなく難しい。
・どうしてここが動かないのかというときは、自分の動きを見ることもある。だから研究室では、ちょっとおかしな動きをしている人もいる(笑)。
・電装系の信頼性をいかに挙げるか。制御系との連携が課題。
・たしかに、ロボットの研究は人間の研究にもなる。単なる分析ではなく、それを構造化してみたい、というのが僕の気持ち。機械にも人間みたいな制御を与えてみたい。でも機械は人間じゃあない。じゃあ機械にとって最適な制御はいったいどんなものなのか。そういうことを考えている。
各部品を組み上げて、それらにそれぞれの性能を発揮させたい、全機させたい。
実際の開発者の方には20代後半~30代前半の人も多く、もろに「ガンダム世代」の人たちがけっこういらっしゃいました(「ロボットとか好きだったし」と仰っていた方もいらっしゃいました)。
本当だったら「自分はこんな凄いものを作っている」ということを言いたくて仕方ないということもあったと思いますが、話に聞いたところによると、大学の恩師や友人が、まあ教えてくれや、というノリで尋ねても絶対に口を割らなかったそうで、チームとしての結束力と、開発チームのモチベーションの高さが伺えます。
しかしいったい何に使うつもりなのかについては全く教えてくれなかったなあ。 何かを考えている、という感触はあったのですが。
というわけで、いわゆる裏話的なものを期待した人がいたかもしれませんが、そうい う話は私は知りません。
あ、一つだけそれっぽい話があるにはあります。以下全くの伝聞ですのでご了承を。
あのロボット達は、実際に研究室で動かしているときには万が一転倒しても大丈夫なようにワイヤーが付けられているんだそうです。
ロボカップのオープニング映像で二台のP3がPK戦をやっているのを見た人は多いと思いますが、あのビデオ、ちょうどいいところで切れているんですね。
なぜ切れているか、そのあとに何が起こったかというと、そう、P3は見事に転倒してしまい、右腕をブッ壊してしまったそうです。
ああいうロボットの部品というのはかなり高いそうなのですが、いったい誰がその辺の面倒をみたのでしょうか(^^;)。
最後に、
取材の機会を作って下さったアスキーの方々と、
そしてもちろん、ホンダの開発者の皆様に御礼申し上げます。
早く「P」の取れたロボットが我々の前に姿を現してくれることを祈って。
あ、念を押しておきますが、
あくまで「1998年の10月17日に私が聞いた話にすぎない」、
ということをお忘れなきよう。
|
◇New Books |
出版社・著者らからの新刊案内をそのまま流します。
本誌が内容を保証するものでも書評でもありません。単なる書籍広告欄です。
あくまでご参考にどうぞ。
新刊案内を流したい編集者・著者は編集人まで。
----------------------------------------- テクノマエストロ フジテレビ/ホリプロ 編 監修 中野不二男 四六判 並製 336ページ 定価(本体1700円+税) ISDN4-408-10331-4 1999年6月7日配本 ----------------------------------------- 「テクノマエストロ」とは ●テクノ=technology(テクノロジー/科学、技術) ●マエストロ=maestro(大家、巨匠、大作曲家、名指揮者) [本書について] 本書はフジテレビ系列で深夜0時20分からの10分間枠で放送されていた『テクノマ エストロ』を単行本化したものです。同番組は1998年4月13日~12月24日までの月曜 日~木曜日に放送され、現在はすでに終了しているのですが、その後もホームページ などへのアクセス、問い合わせの反響が大きく、一部で単行本化を期待されておりま した。 番組をひと言で表すなら「科学者・技術者のプロモーションビデオ」といったとこ ろでしょうか。どんな発明、新技術を開発したかという説明よりも、伝記的に人物を 紹介するところに主眼をおいた構成になっております。 合計で140組の科学者が登場します。エジソンやアインシュタインなども登場しま すが、そのほとんどが存命の日本人です。彼らの発明には商品名を見知っている技術 もあれば、聞いたこともないものもあります。発明や新技術に感嘆するのはもちろん ですが、なによりもこれらの発見が同時代の日本人によって成し遂げられたことに新 鮮な驚きを感じられることでしょう。 まずは本書を開いていただき、テクノマエストロたちの偉大なる業績を堪能してい ただければ幸いです。 [お問い合わせ先] 実業之日本社 第一出版部 担当 長岡 努 〒104-8233 東京都中央区銀座1-3-9 TEL 03-3562-4041 FAX 03-3562-3200 E-mail kurtz@kt.rim.or.jp |
|
◇Event |
科学に関するイベント情報などを収集して告知します。
告知したいイベント主催者は編集人までメールを。
■生化学若い研究者の会恒例、第39回夏の学校開催 1999年7月31日(土)~8月2日(月)愛知県労働者研修センターにて 生命科学の最先端を担う講師22名の分科会、シンポジウム、研究交流会 http://www.seikawakate.com/natu/natu.html
|
◇Website |
この欄では、私が時折訪問するウェブサイト、ポピュラーサイエンスという面でも優
れた内容を持つウェブサイトを勝手に紹介する。
日本語で書かれたポピュラーサイエンスのサイトは確かに数少ない。
だが、数少ないなりにはあるのだ。
■スペースパーソン
http://spaceboy.nasda.go.jp/Spacef/sp/j/sp_j.html
これはNASDAこと宇宙開発事業団の広報室が作成しているウェブで、NASDAほかで宇宙
開発に従事している人たちへの取材記事が、簡単なインタビュー形式で掲載されてい
る。現在最新号は「地球環境の未来を探るEORCの観測データ解析業務-宇宙開発事業団
地球観測データ解析研究センター・沖理子 佐野琢己-」。
|
◇from editor's diary |
編集人のウェブ日記から、ある一日を適当に抜粋します。
99.06.21 くもりhttp://www.moriyama.com/diary/1999/diary.99.06.htm#diary.99.06.21 より
▼こないだ原稿で「宇宙ステーションはデブリをいくらかは回避できる」と書いたばっかだったのに、いきなりロシア製ロケット破片回避のための噴射に失敗しやがった。ニアミスですんだから良かったものの、距離8キロである。大丈夫か本当に。なんかよく分からないが、コンピュータが命令を間違いと認識した、ためらしい。
▼しばしばお世話になっている早稲田の河合さん(http://www.moriyama.com/netscience/Kawai_Takashi/)からメールが来る。曰く、「脳の記憶領域にアクセスしている時の目の動きが気になる」と。
どういうことかというと、僕らは記憶を探って何かを思い出そうとするとき、だいたい、どこか遠い目をするでしょ。これはいったい何を意味しているのだろうか、そのとき何事が起こっているのだろうか、ということです。
「遠い目」というのは「輻輳角が遠点にある」という言い方をするのだが、さすがに立体映像の研究者らしい目のつけどころである。思わず遠い目をして考えてしまった。あれはなんなんだろ。
記憶も探ってみたが、そのときいろんなレベルで何がどうなっているのか調べている人がいる、という話は聞いたことがない。河合さんも文献検索したが見つからなかったという。どなたか何かご存じでしょうか? また、その時はどんなことを起こっているとお考えでしょう? ご教授あるいはウェブ日記のネタにでもして頂ければ幸いです。
|
◇from editor |
というわけでいわゆる編集後記です。
メールマガジン業界はいろいろと賑やかです。科学系のメールマガジンはそんなに数 ないですが、ついにあの『ネイチャー』も「日本語目次e-mailサービス」を始めまし た。ようやくという感じですが、科学ファンとしては脳天気に喜ばしいことです。
本誌は今回このような形で創刊しましたが、内容・構成は毎回変わるかもしれませ ん。たぶん変わるでしょう。どちらかというと今回が変則的だと思って下さい。また 分量も毎回ぜんぜん違うと思います。質においてはいわんやをや、でしょう。
いちおう週刊目標ですが、編集人やネタの都合によって間が空くこともあろうかと思 います。いちおう、出来とかそんなことはあまり考えず、気楽に出していくつもりで す。もろもろ、ご容赦頂ければ幸いです。
では、今後ともよろしくどうぞお願い申し上げます。
| 本誌ホームページ:http://www.moriyama.com/popular_science_node/ *本誌に関するご意見・お問い合わせはmoriyama@moriyama.comまでお寄せ下さい。 |
|
新刊書籍情報・イベント告知情報ほか各種情報の掲載について
新刊書籍情報やイベント告知などを流したい方は、編集人にご相談いただければ、
本誌で掲載することが可能です。moriyama@moriyama.com宛にお問い合わせください
(無料です。Popular Science Nodeの件であることを明記して下さい)。 |